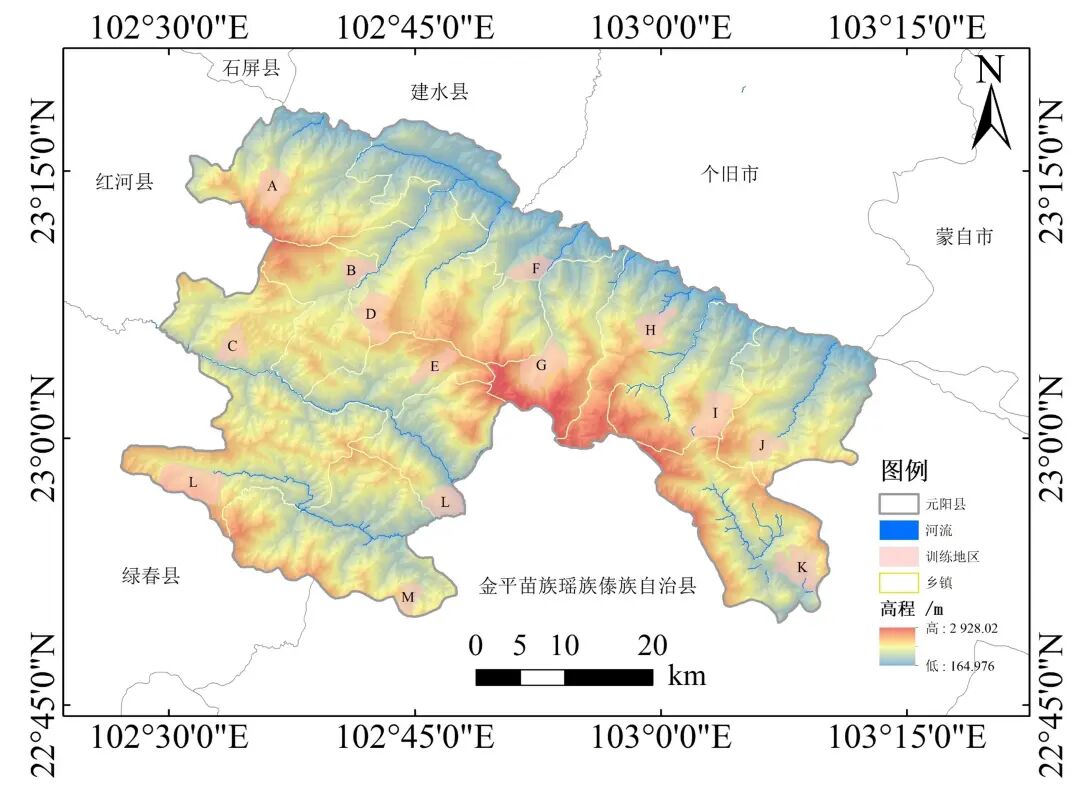
 。智慧农业(中英文), 2024, 6(3): 46-57.doi: 10.12133/j.smartag.sa202312028引用: 张军, 陈宇燕, 秦振宇, 张梦瑶, 张军. 基于Improv Deeplab V3+的梯田遥感方法[J].智慧农业, 2024, 6 (3): 46-57.doi: 10.12133/j.smartag.SA202312028 改进的Deeplab v3+模型下梯田遥感提取研究 张军1, 陈宇燕1, 秦振宇2, 张梦瑶1, 张军1* (1. 云南大学, 云南 昆明 650500;为解决复杂的地形条件和耕作环境导致传统遥感数据和监测方法难以自动提取梯田的问题,探索了利用深度学习技术从高分辨率遥感影像中精确提取梯田面积的方法。 [方法]利用高分6号梯田崩塌过程影像构建语义分割数据集,并采用改进的DePlab V3。提出+模型。该模型采用轻量级的Mobilenet v2网络作为骨干网络。为了兼顾局部细节和全局上下文,采用多尺度特征融合模块(MSFF)模块替代空洞空间金字塔池化(ASPP)模块,并采用扩展率递增的空洞卷积级联模式改善信息丢失问题。此外,针对浅层特征和深层特征采用坐标注意力机制来增强目标网络的学习。 [结果与讨论] 红、绿、近红外波段组合在梯田提取的精度和效果上表现最好。与原DEEPLAB V3+网络相比,准确率、召回率、F1分数和交叉比指标分别提高了4.62%、2.61%、3.81%和2.81%。此外,与 UNET 和原始 Deeplab v3+ 相比。其参数数量仅为UNET的28.6%,原始Deeplab V3+的19.5%。同时,浮点运算次数仅为UNET和Deeplab V3+的1/5。这不仅提高了计算效率,而且使改进后的模型更适合资源有限或计算能力较低的环境。 [结论]深度学习在高分辨率遥感影像中识别梯田的准确率较高,为梯田精细化监测管理提供参考。关键词:梯田收购;遥感;卷积神经网络;高分六号卫星; DEEPLAB V3+图1 原阳县位置及样本分布图图2 梯田识别数据集的构建过程3 增强型Deeplab V3+图3结构3 图4 不同班达无花果组合下试验区梯田提取结果。图5 原阳县梯田及公共区域识别结果图6 元阳梯田空间分布不同坡度上的县图7 元阳县不同海拔梯田空间分布图8 不同算法反演结果局部细节对比 作者简介 张军 副研究员 张军,博士,副研究员,现任云南大学地球科学学院硕士生导师,中国遥感应用协会理事。主要从事海外罂粟替代种植遥感信息提取和遥感监测领域的教学和科研工作。在《IEEE Journal of Selected Topics in Applied Earth Observation and Remote Sensing》、《农业工程学报》、《林业科学》、《测绘科学》等期刊发表论文20余篇。作为主要贡献者获得高分专项卫星应用杰出成就奖三等奖。这已完成的海外罂粟替代项目由雪强国出版。来源:《智慧农业(中英文)》2024年第3期
。智慧农业(中英文), 2024, 6(3): 46-57.doi: 10.12133/j.smartag.sa202312028引用: 张军, 陈宇燕, 秦振宇, 张梦瑶, 张军. 基于Improv Deeplab V3+的梯田遥感方法[J].智慧农业, 2024, 6 (3): 46-57.doi: 10.12133/j.smartag.SA202312028 改进的Deeplab v3+模型下梯田遥感提取研究 张军1, 陈宇燕1, 秦振宇2, 张梦瑶1, 张军1* (1. 云南大学, 云南 昆明 650500;为解决复杂的地形条件和耕作环境导致传统遥感数据和监测方法难以自动提取梯田的问题,探索了利用深度学习技术从高分辨率遥感影像中精确提取梯田面积的方法。 [方法]利用高分6号梯田崩塌过程影像构建语义分割数据集,并采用改进的DePlab V3。提出+模型。该模型采用轻量级的Mobilenet v2网络作为骨干网络。为了兼顾局部细节和全局上下文,采用多尺度特征融合模块(MSFF)模块替代空洞空间金字塔池化(ASPP)模块,并采用扩展率递增的空洞卷积级联模式改善信息丢失问题。此外,针对浅层特征和深层特征采用坐标注意力机制来增强目标网络的学习。 [结果与讨论] 红、绿、近红外波段组合在梯田提取的精度和效果上表现最好。与原DEEPLAB V3+网络相比,准确率、召回率、F1分数和交叉比指标分别提高了4.62%、2.61%、3.81%和2.81%。此外,与 UNET 和原始 Deeplab v3+ 相比。其参数数量仅为UNET的28.6%,原始Deeplab V3+的19.5%。同时,浮点运算次数仅为UNET和Deeplab V3+的1/5。这不仅提高了计算效率,而且使改进后的模型更适合资源有限或计算能力较低的环境。 [结论]深度学习在高分辨率遥感影像中识别梯田的准确率较高,为梯田精细化监测管理提供参考。关键词:梯田收购;遥感;卷积神经网络;高分六号卫星; DEEPLAB V3+图1 原阳县位置及样本分布图图2 梯田识别数据集的构建过程3 增强型Deeplab V3+图3结构3 图4 不同班达无花果组合下试验区梯田提取结果。图5 原阳县梯田及公共区域识别结果图6 元阳梯田空间分布不同坡度上的县图7 元阳县不同海拔梯田空间分布图8 不同算法反演结果局部细节对比 作者简介 张军 副研究员 张军,博士,副研究员,现任云南大学地球科学学院硕士生导师,中国遥感应用协会理事。主要从事海外罂粟替代种植遥感信息提取和遥感监测领域的教学和科研工作。在《IEEE Journal of Selected Topics in Applied Earth Observation and Remote Sensing》、《农业工程学报》、《林业科学》、《测绘科学》等期刊发表论文20余篇。作为主要贡献者获得高分专项卫星应用杰出成就奖三等奖。这已完成的海外罂粟替代项目由雪强国出版。来源:《智慧农业(中英文)》2024年第3期
新浪财经公众号
24小时播放最新财经新闻和视频。更多粉丝福利,扫描二维码关注(新浪财经)
